近日,无码av影片
惠飞教授团队与权思文副教授团队的两项创新性研究成果先后被人工智能领域顶级国际期刊《IEEE Transactions on Pattern Analysis and Machine Intelligence》(TPAMI)接收发表。
惠飞教授团队长期致力于自动驾驶环境感知与边缘计算研究。针对三维目标检测模型在嵌入式设备上部署时面临的计算资源受限难题,团队创新性地提出类别知识驱动的网络压缩框架(CLEAN),实现了高性能3D目标检测模型的轻量化与加速,为自动驾驶、机器人导航等实时应用场景提供了全新解决方案。论文《CLEAN: Category knowledge-driven compression framework for efficient 3D object detection》中,惠飞教授为第一通讯作者,张昊楠老师为第一作者,西安交通大学人工智能无码av影片刘龙军副教授为共同第一作者和共同通讯作者,无码av影片
作为第一署名单位和第一通讯单位。
权思文副教授团队围绕计算机视觉中的三维点云配准难题,提出"Single Voter Spreading"创新机制,显著提升了三维对应点分组与配准的效率和鲁棒性。该技术可广泛应用于增强现实、文化遗产数字化保护、工业零件检测等领域。在论文《Single Voter Spreading for Efficient Correspondence Grouping and 3D Registration》中,权思文副教授为第一作者,2023级硕士生曾钊为学生第一作者,展现了无码av影片
研究生扎实的科研创新能力。论文第一署名单位为无码av影片
,相关研究由无码av影片
与西北工业大学联合完成。
TPAMI由中国计算机学会(CCF)认定为A类推荐期刊(2024年影响因子:18.6),与CVPR、ICCV等顶级会议并列,是人工智能与模式识别领域影响因子最高、审稿最严格的学术期刊之一,长期关注机器学习、计算机视觉等前沿方向。
两篇高水平论文的连续发表,体现了无码av影片
在三维视觉、深度学习等方向的深厚积累,也说明从教师团队到研究生梯队,无码av影片
已形成结构合理、创新活跃的高水平研究群体。
《CLEAN: Category knowledge-driven compression framework for efficient 3D object detection》论文简介:
基于点云的三维目标检测网络在自动驾驶感知系统中发挥着重要的作用,然而大量的参数和重复的运算却限制了点云检测网络在实际资源受限车载平台上的部署。知识蒸馏技术(knowledge distillation)能够有效地获取轻量化点云检测网络,但传统蒸馏方案通常在同构网络之间传递有限的知识,并且它们没有充分探索最优的网络架构,这限制了学生网络的精度提升。为了解决上述问题,如图1所示,研究团队提出了一种类别知识驱动的网络压缩框架。首先,该方法提出学生驱动的预测蒸馏策略(student-oriented knowledge distillation, SKD)和两阶段知识驱动的标签蒸馏策略(two-stage-oriented label assignment distillation, TLAD),它们将两阶段检测网络的知识迁移至单阶段检测网络(异构蒸馏),从而避免同构蒸馏对网络精度提升的限制。另外,为了探索最优的轻量化学生网络架构,该压缩框架提出关键区域类别知识驱动的结构化剪枝方案(masked category knowledge-driven structured pruning, MCaPr),其通过移除架构前后,关键区域对应类别预测的变化来度量对应架构的重要性。此外,该压缩框架建立基于交并比的冗余预测消除模块(modified IoU-aware redundancy elimination, MIRE),以此来进一步移除冗余的假阳性预测,获取更高的检测精度。大量实验验证了所提出压缩框架的有效性,如在WOD-mini数据集上,该方法在将CenterPoint网络参数量减少5.2倍的情况下,精度(L2 mAPH)反而提升了0.55%。研究成果为点云三维目标检测网络在实际车载平台上的部署提供了有效的解决方案。
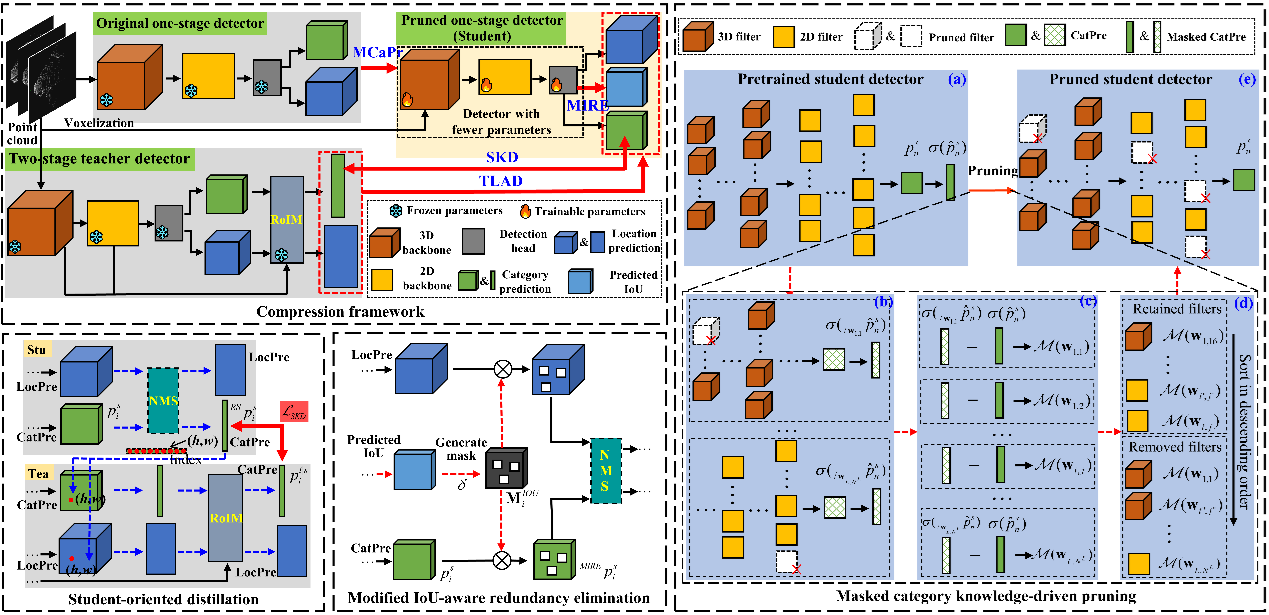
图1 类别知识驱动的网络压缩框架示意图
论文信息:H. Zhang, L. Liu, F. Hui, B. Zhang, H. Zhang and Z. Zha. CLEAN: Category Knowledge-driven compression framework for efficient 3D object detection [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 47, no. 10, pp. 8740-8755.
《Single Voter Spreading for Efficient Correspondence Grouping and 3D Registration》论文简介:
针对点云间初始对应关系存在大量外点、重叠度有限等显著干扰,进而导致下游三维配准与识别任务面临严峻挑战的行业痛点,团队提出了一种基于单投票者扩散(SVOS)的高效三维对应分组与配准方法,其核心创新在于仅利用低阶图约束构建单投票者扩散投票机制,在无需搜索复杂约束的前提下,实现了与复杂约束相当的约束能力。通过在3DMatch与3DLoMatch等标准数据集上开展的大量实验验证,SVOS方法在配准精度与效率上均优于现有方法,尤其在面对99.9%的海量外点极端场景时,其配准精度显著高于当前主流SOTA方法,充分验证了该方法在应对复杂干扰场景下的显著优势与良好鲁棒性。
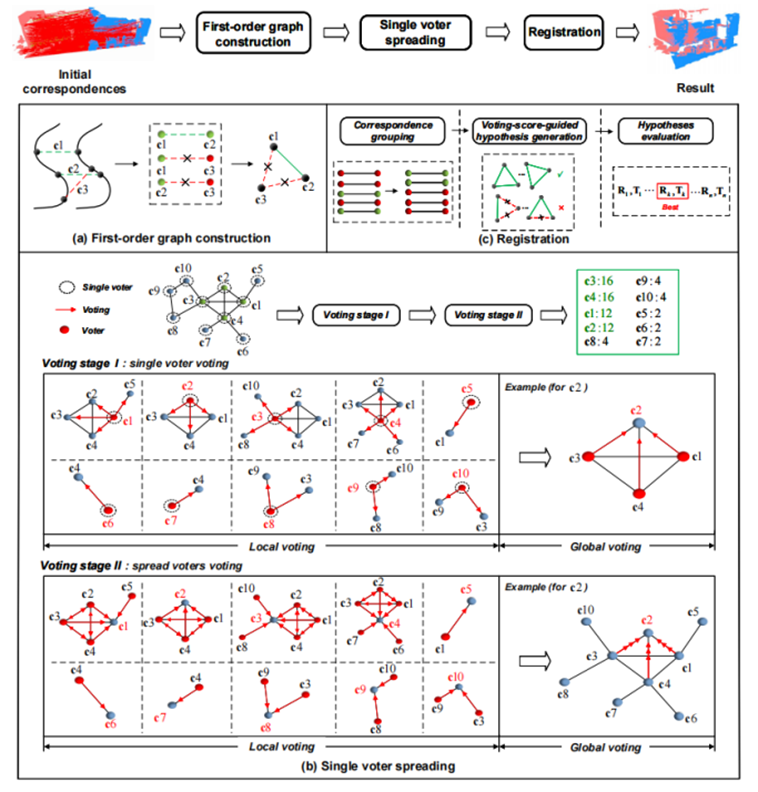
图2 研究方法流程
论文信息:Quan S, Zeng Z, Zhang X, et al. Single Voter Spreading for Efficient Correspondence Grouping and 3D Registration[J]. IEEE transactions on pattern analysis and machine intelligence, 2026, 48(2): 1081-1097.


